Engineering work, competition builds, and research explorations.
Led embedded development for a swerve-drive infantry robot — custom encoder design, gimbal stabilization, omnidirectional chassis control, and power management. Won 1st place at the Southwest Regional and 3rd nationally at RoboMaster 2025.
Embedded lead for a 7-axis robotic arm engineer robot with mecanum chassis. Built the full control stack from ROS2+MoveIt2 motion planning on the host PC down to real-time joint control on STM32.
Built a mobile manipulation system based on Diffusion Policy and VLA (π0.5) for household tasks. Deployed on a 7-DoF arm + differential drive base, with TeleOp data collection using a single smartphone.
Built a complete electronic system from scratch in 4 days for the National Electronic Design Contest. Competed at the provincial level.
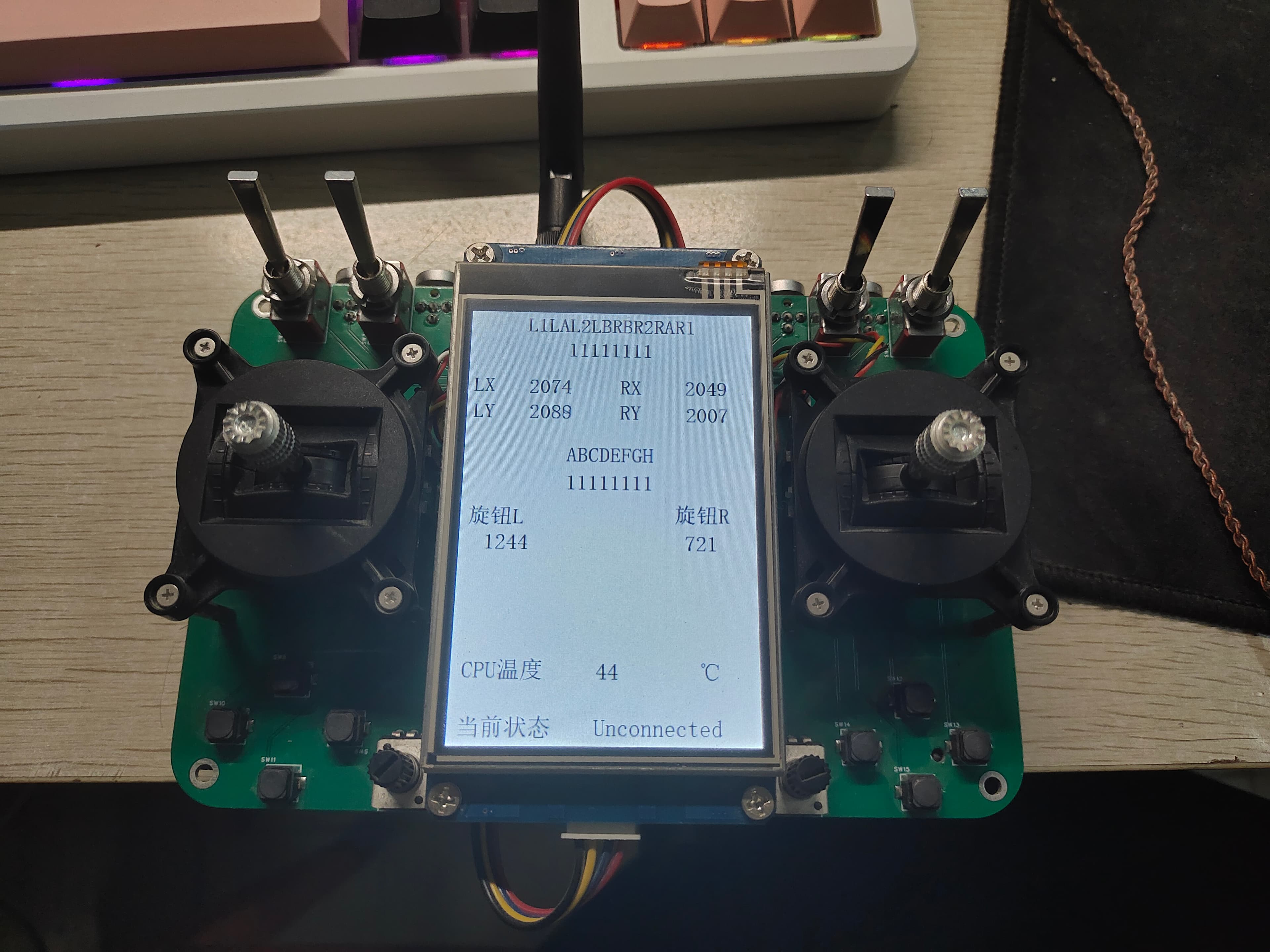
Designed and open-sourced a custom RC transmitter — custom PCB, STM32 firmware, and ergonomic 3D-printed housing.
Reproduced the π0 vision-language-action model on a real robot arm from scratch in 3 months — built the arm, collected data, fine-tuned, and deployed end-to-end.
A collection of personal hardware builds — custom PCBs, 3D-printed enclosures, embedded gadgets, and various electronics projects built for fun and practical use.